Innovation
CR1 - Mars Habitat Design and Build

The Martian Habitat Design was a project that I participated in during my exchange study at Cal Poly Pomona 2017-2018. It was a yearlong project in the form of a design studio, a robotic elective, and a design-build studio. More than 60 students from the Department of Architecture and the Department of Engineering participated in different phases of the development, which began with conceptual design (ideation), prototyping, and large-scale model building. I have been engaged heavily from the start and became the project coordinator in the final phase. During the process, I realized the importance of teamwork and the inevitable trial and error of the design process.
This proposal addresses the challenge of creating a habitation system that has commonality in both the in-space and surface habitat designs so the crew will be familiar with the layout, function, and location of everything in the surface habitat when they arrive on Mars.
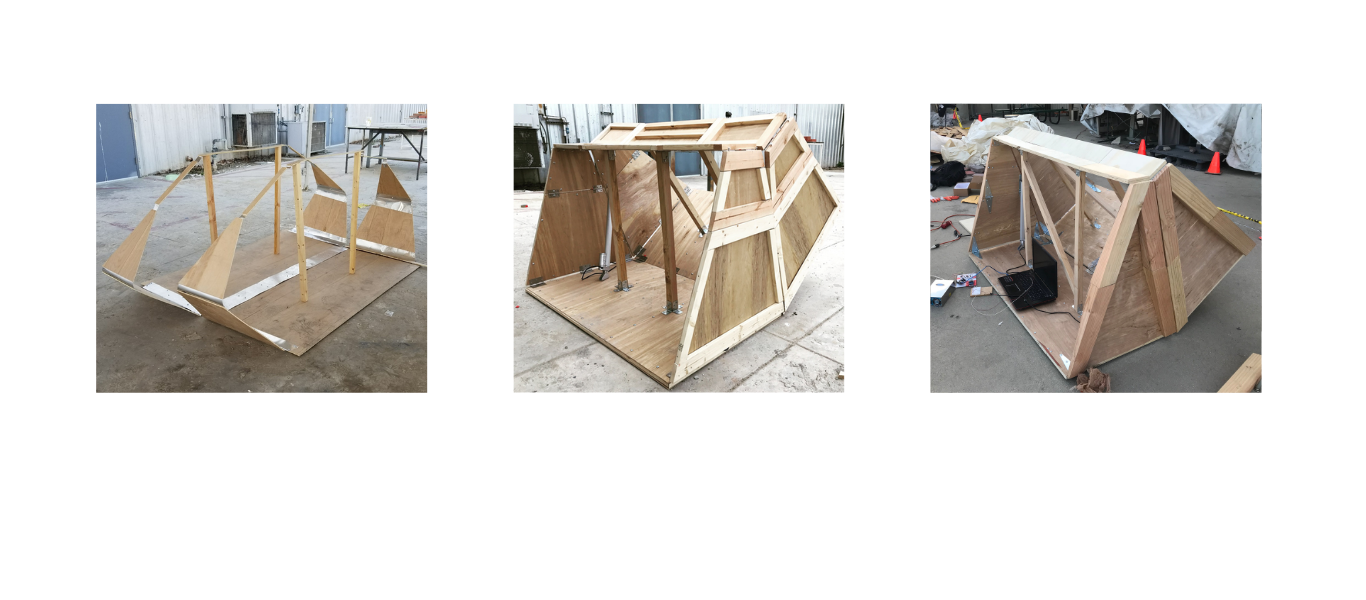
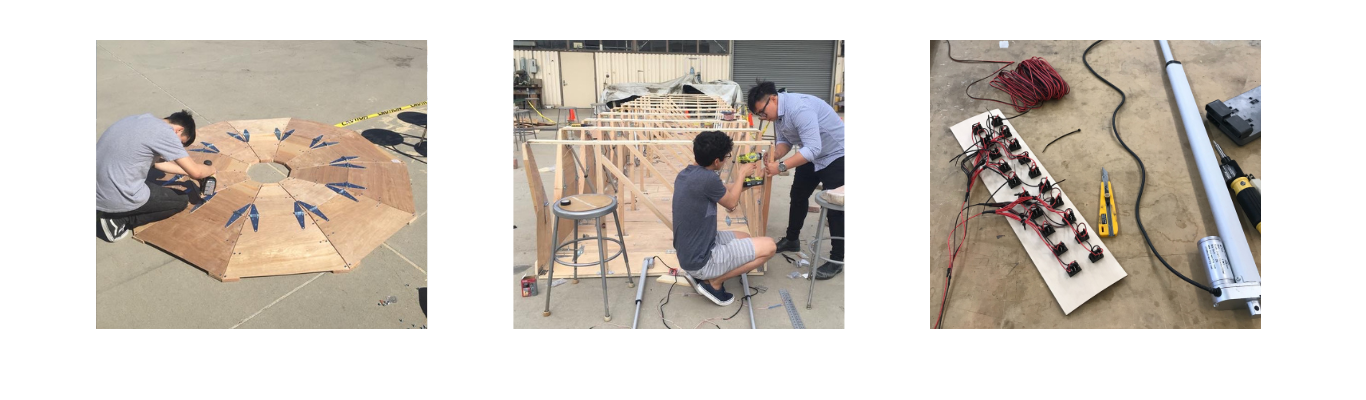
The final physical prototype was built on two scales, a full-scale and a quarter-scale, respectively. The full-scale model displays the interior configuration through AR technology to understand ergonomics and human scale. At the same time, the quarter-scale prototype was to demonstrate the mechanisms and connections during deployment and inflation. I participated in the design and building of the quarter-scale prototype and was in charge of the whole mechanism's circuits and controls. Since, in the beginning, I had zero knowledge of circuits and controls, I learned via Google and YouTube, and eventually, the prototype successfully unfolded the way we wanted.



.jpg)
In the end, we transported the quarter-scale prototype to Giant Rock for video shooting, where we had the prototype successfully deployed and delivered the final production.
.png)
In the robotic elective, we aim to build small robots to address possible ways of deployment and propulsion systems in robotics approaches. We successfully demonstrated the propulsion unit with the primary programming language and proper wiring, but the robot could not deploy smoothly due to weight. The following illustration was the design result of my teammate, Gem, and me.


CPP-HAB has been presented at five professional conferences. Its final stop was the 2018 American Institute of Aeronautics and Astronautics (AIAA) Space Forum in Orlando, Fla.
The model and robotic been showcased in SFMOMA Far Out - Suits, Habs, and Labs for Outer Space, during 2019 to 2020.